Teorema de límite inferior (teorema estático) • Campo tensional en equilibrio con acciones exteriores • Respeta ecuación constitutiva Reacciones menores o iguales a la de falla Teorema de límite superior (teorema cinemático) • Mecanismo con trabajo igual a energía disipada • Respeta ecuación constitutiva Reacciones mayores o iguales a las de falla
14.2 TEOREMA DEL LÍMITE INFERIOR (TLI) o TEOREMA ESTÁTICO:
Una carga externa calculada a partir de una distribución de esfuerzos internos adoptada, que cumple las condiciones:
Estar en equilibrio con la carga aplicada
No superar en ningún punto el límite plástico.
Es siempre MENOR o igual que la verdadera carga de colapso. Por lo tanto es “SEGURA“. OBS: Para estar en equilibrio con la carga externa, solamente debe verificarse: ∂2Mx / ∂x2 + ∂2My / ∂y2 + 2 ∂2 Mxy / ∂x ∂x = -q
Observar que las infinitas soluciones posibles incluyen a la solución de la teoría elástica.
El TLI implica encontrar un esquema de Esfuerzos Internos (Momento, Corte, etc) que simplemente cumpla las ecuaciones de equilibrio interno.
En el caso de las placas planas, la ecuación diferencial de equilibrio es la que se muestra arriba.
CUALQUIER juego de funciones MX(x, y), My(x,y), Mxy(x,y) que cumplan la ecuación diferencial, siempre que en ningún punto (x,y) se superen los valores de MPlástico, cumple con el TLI.
Como se tiene tres funciones incógnita, y una sola ecuación diferencial, se deduce inmediatamente que existen infinitas soluciones posibles. Entre todas ellas se encuentra la solución elástica, como un caso particular.
IMPORTANTE: Los resultados obtenidos mediante la aplicación de este Teorema son SEGUROS, porque predicen que la estructura colapsa con una carga que es siempre menor, o a lo sumo igual, a la verdadera carga de colapso.
Despreciando los Mxy: ∂2Mx / ∂x2 + ∂2My / ∂y2 = -q ( 1 ) Ejemplo: Placa cuadrada de lado L, se adopta: My=0 ; Mx = -4 Mo/L2 *x(L-x). siendo Mo: Momento máximo en el centro de la placa, asumido igual al momento último (para cumplir estrictamente la segunda condición) Esta función cumple (1) siempre que sea qu = 8Mo/L2 Observar que la solución elástica daría (OJO: para el caso de placas sin torsión):
qu = 13.1 Mo/L2
Por ejemplo, si se tiene una placa cuadrada de lados Lx=Ly=L, se puede proponer la función My de la figura, y encontrar una de las infinitas soluciones posibles, siempre que se dimensione a la placa para que su Momento Plástico sea mayor o igual al valor máximo:
Mpl ≥ Mo
Otra alternativa sería repartir “mitad y mitad” la solución entre los momentos Mx y My, haciendo por ejemplo (y siendo siempre Mxy=0):
Mx = -0.50 Mo/L2 x(L-x)
My = -0.50 Mo/L2 y(L-y)
Funciones que cumplen la ED de equilibrio, siempre que sea, una vez más:
q = 8 Mo / L2
14.3 TEOREMA DEL LÍMITE SUPERIOR (TLS) o TEOREMA CINEMÁTICO.
Una carga externa calculada a partir de un mecanismo cinemático adoptado (compatible con los vÍnculos) que cumple la condición:
Estar en equilibrio con la carga aplicada Es siempre MAYOR o igual que la verdadera carga de colapso. Por lo tanto es “INSEGURA“.
El TLS involucra el planteo de un MECANISMO DE COLAPSO que sea posible, es decir, que sea cinemáticamente compatible con los vínculos de la estructura.
La única condición que se aplica en este caso es que los esfuerzos internos estén en equilibrio con las cargas externas.
Este Teorema se utilizará en lo que resta del desarrollo del tema, por lo que no se da en este momento ningún ejemplo como en el caso del TLI.
IMPORTANTE: Los resultados obtenidos mediante la aplicación de este Teorema son INSEGUROS, porque predicen que la estructura colapsa con una carga que es siempre mayor, o a lo sumo igual, a la verdadera carga de colapso
14.4 TEOREMA DE UNICIDAD
Una carga externa calculada a partir de a partir de un mecanismo cinemático adoptado (compatible con los vÍnculos), que cumple las condiciones:
Estar en equilibrio con la carga aplicada.
No superar en ningún punto el límite plástico.
Es IGUAL a la verdadera carga de colapso. En resumen: cuando las qu obtenidas por el TLS y el TLI coinciden, se tiene la verdadera carga de colapso:
qultLS ≥ q ult Real ≥ qultLI
Este Teorema de Unicidad es una especie de corolario evidente a partir de los dos teoremas anteriores. Resulta evidente que, si el Teorema Estático o TLI aproxima inferiormente a la verdadera carga de colapso, y el Teorema Cinemático o TLS aproxima superiormente a la verdadera carga de colapso, un cálculo de la carga externa que cumpla
simultáneamente las condiciones de ambos teoremas, permite obtener la carga de colapso exacta.
Para el análisis plástico de placas planas , se utilizará el TLS o Teorema Cinemático.
Para aplicar este teorema, es necesario definir un Mecanismo Cinemático compatible con los vínculos, o Configuración de Rotura CR.
En el caso de una estructura lineal, de barras, los mecanismos cinemáticos se definen usualmente (no exclusivamente), a través de rótulas.
En el caso de una estructura plana como es una placa, con dos dimensiones predominantes, se tendrá líneas de rotulación, como si se tratase de bisagras.
La formación de este tipo de mecanismo tiene una confirmación experimental, como se muestra en las figuras de arriba y de las hojas siguientes.
En realidad, las zonas de plastificación se distribuyen en un cierto ancho, pero eficientemente limitado como para poder asumir que se las puede representar por “líneas de bisagra”.
A estas “bisagras” de las denomina LÍNEAS DE ROTURA y se abrevia “LR” Cuando el momento flector que actúan en la LR es positivo, y por lo tanto tracciona la cara inferior de la placa, se dice que es una Línea de Rotura Positiva o LR+. Por oposición, cuando el momento que actúa es negativo, tracciona la cara superior de la placa, y se tiene una LR-.
Para definir el mecanismo que permite aplicar el TLS, se plantean las condiciones indicadas arriba.
Se considera que en TODA la extensión de cada LR actúa el momento de plastificación Mpl.
En las LR+, el momento se denomina “ m ”
En las LR-, el momento se denomina “ m´ ”
Salvo que se indique lo contrario, se asume que m = -m´. Es decir que se supone, para el análisis, que los momentos positivos y negativos tienen el mismo valor absoluto. No obstante, se verá en el resto del desarrollo del tema que siempre es posible abandonar esta hipótesis y considerar momentos de diferente valor absoluto.
Como se ha supuesto que el comportamiento del material es Rígido-Plástico, todas las zonas de la placa que están fuera de las LRs no sufren deformaciones, y por lo tanto de mantienen planas. Todos los giros se concentran en las LRs.
El mecanismo o CR toma, entonces, la forma de una especie de techoinvertido de caras planas y varias aguas.
La definición del mecanismo divide a la placa en Subsectores planos, delimitados por las LRs y los bordes de la placa. Cada uno de estos subsectores posee un EJE, en torno al cual gira como cuerpo rígido.
Para que el mecanismo sea cinemáticamente posible, es condición necesaria que el Eje de un subsector pase por alguno de los apoyos de la placa.
El contacto entre dos Subsectores se produce siempre a través de una LR. Esta LR debe pasar indefectiblemente por la intersección de los dos ejes de los Subsectores en consideración. Si los dos ejes son paralelos, entonces la LR será paralela a ambos.
Para una misma placa, existen infinitos mecanismos posibles, siempre que cumplan con las condiciones estipuladas.
En las figuras se muestran algunos ejemplos de cumplimiento y no cumplimiento de las condiciones necesarias para definir el mecanismo.
En la figura superior la placa tiene 4 bordes, y el mecanismo propuesto define 4 Subsectores. Como los 4 apoyos son lineales, no queda más alternativa que cada uno de ellos sea el eje de rotación de un subsector, lo cual simplifica la definición del mecanismo.
El eje del Subsector “A” es la recta 14, del “B” la recta 1-2, y así siguiendo.
Las LRs 1-5 y 4-5 son posibles, porque pasan por la intersección de los ejes de los subsectores que dividen.
La LR 5-6 no cumple la condición, porque divide a los subsectores B y C, cuyos ejes (1-2 y 4-3) son paralelos, y por lo la LR 5-6 debería ser a su vez paralela a ambos.
Las LRs 6-2 y 6-2 cumplen la condición al pasar por los puntos 2 y 3, pero el punto 6 es incorrecto, por lo que en ese sentido tampoco son válidas.
Es fácil ver que si se considera que los Subsectores B y C giran un mismo valor angular en torno a sus propios ejes (de signo contrario), el descenso del punto 5 resulta el mismo calculado desde cualquiera de ambos subsectores, pero el descenso del punto 6 resulta mayor si se lo calcula por el subsector C que por el B
La figura inferior muestra un ejemplo similar.
Cuando alguna de las condiciones de apoyo es puntual, es decir, apoyo directo en una columna, entonces es condición necesaria que un eje de rotación pase por ese punto, pero como por un punto pasan infinitas rectas, entonces la ubicación de ese eje puede ser cualquiera de esas rectas . Esto agrega elementos al conjunto de mecanismos cinemáticos
posibles.
Los ejes de los subsectores B y C deben necesariamente coincidir con los apoyos lineales , pero el del subsector A puede ser cualquier recta que pase por la columna. El mecanismo de la figura es uno de los tantos posibles mientras que este es otro de los que resultan posibles.
Es importante señalar, además, que la cantidad de apoyos existentes es una indicación de los subsectores en que se puede dividir el mecanismo, pero en realidad pueden ser más o menos que los apoyos existentes.
El concreto armado es un material compuesto que es ampliamente usado en el mundo desde que Joseph Monier lo patentó en el siglo XIX. Su extensivo uso se debe, principalmente, a la economía y eficiencia que permite la combinación entre el concreto y acero para resistir una gran variedad de solicitaciones.
El concreto armado es un material que no se comporta elásticamente durante todo el desarrollo de su capacidad resistente. Para condiciones de servicio se puede considerar un comportamiento aproximadamente lineal – elástico pero, cuando las solicitaciones superan esta etapa, los elementos de concreto armado empiezan a comportarse inelásticamente.
El diseño por resistencia, el cual ha sido adoptado desde el año 1971 por el ACI y por la norma peruana, contempla que la estructura puede alcanzar un estado límite de daño controlado, basado en la pérdida de capacidad resistente en compresión del concreto. En este punto, el comportamiento de los elementos estructurales es evidentemente no lineal e inelástico. A pesar de esto, por facilidad, se permite métodos de análisis estructural elásticos para el diseño.
Tanto la norma peruana como las extranjeras, no presentan una metodología para el análisis y diseño límite. Sin embargo, permiten modificar el diagrama de momentos flectores elásticos, mediante redistribución de momentos, si es que el elemento cuenta con una ductilidad adecuada para desarrollar deformaciones plásticas y la zona hacia donde se está redistribuyendo el momento, cuenta con un exceso de resistencia para resistir el aumento de solicitación de momento.
13.2 FUNDAMENTOS, APLICABILIDAD Y LIMITACIONES
En el análisis y diseño de losas hay una gran cantidad de conceptos y fundamentos teóricos involucrados que se ha considerado pertinente mencionarlos para facilitar el entendimiento de los procedimientos que sellevan a cabo durante dicho proceso.
Durante muchos anos el calculo estructural estuvo basado en la teoria de linea recta también conocida como teoría de los Esfuerzos Admisibles, en la que los elementos se diseñaban para soportar un esfuerzo admisible menor al de rotura (máximo), rango en el cual las relaciones esfuerzos - deformación pueden considerarse lineales (ley de Hooke, de allí el nombre de linea Recta)
Cargas a las cuales estará sometida las estructuras cuando entre en servicio: por ejemplo el peso propio de los elementos, personas, objetos, Etc.
Esta teoría con llevaba a la obtención de dimensiones muy grandes de los elementos debido a que solo se les permitía trabajar a un porcentaje de su resistencia máxima y no dejaba un rango de seguridad debido a la incertidumbre que existe en el calculo de algunas de las cargas que actúan sobre una estructura.
En la actualidad se ha adoptado la teoría de rotura como patrón de trabajo en el ámbito de la Ingeniería Estructural, en esta los materiales se diseñan en base a su máxima capacidad (a la rotura) pero para cargas ya no reales, sino mayoradas, lo que le aporta un rango de seguridad mas amplia al calculo estructural.
13.4 Modelo esfuerzo – deformación del concreto no confinado.
Existen distintas propuestas para las curvas de esfuerzo – deformación del concreto no confinado. Estas están basadas en resultados de ensayos a compresión axial simple de probetas de 6’’x12’’ de concreto y de un ajuste de los resultados a formas conservadoras que puedan idealizar el comportamiento del concreto no confinado en sus diferentes etapas.
El concreto tiende a deformarse, también, perpendicularmente a la carga axial aplicada por el efecto Poisson y se fisura una vez que el esfuerzo supera la adhesión entre la pasta de cemento hidratada y el agregado. Al seguir incrementando la carga, las grietas se vuelven inestables y el elemento no es capaz de soportar más carga.
Una de las propuestas más aceptadas y utilizadas para representar al concreto no confinado, es la propuesta hecha por Elvind Hognestad en 1951 [9], la cual intenta representar el comportamiento del concreto no confinado en un elemento sometido a flexión.
Se puede observar en la figura 5, una zona inicial parabólica que se asemeja muy bien a la curva de esfuerzo – deformación obtenida cuando se ensayan probetas en compresión simple.
Para esta curva, f’’c o la resistencia a la compresión de un elemento real de concreto sometido a flexión, se estima como 0.85 f’c, es decir como un valor reducido al valor del resistencia característica de la probeta estándar de concreto (probeta de 6’’ x 12’’). La reducción intenta tomar en cuenta diversos factores que influencian el comportamiento de un elemento de concreto en flexión a diferencia de uno sometido solo a compresión. Estos efectos pueden ser, por ejemplo, que elementos como vigas son vaciados horizontalmente mientras que las columnas, se vacían de forma vertical.
Para fines de análisis y diseño, en la presente tesis se usará el modelo antes presentado de Hognestad y, también, se realizó un estudio teórico usando el mismo modelo pero con deformaciones del concreto del orden de 0.6% y 1% (confinado). La elección de estos modelos se debe a su simplicidad para ser programados y por la amplia investigación realizada con ambos.
13.5 Modelo esfuerzo – deformación del acero de refuerzo
El concreto armado debe su capacidad de resistir esfuerzos de tracción, al acero de refuerzo con el que cuenta. En ese sentido, tanto la cuantía de acero colocada como el modelo esfuerzo –deformación con el que se trabaje, toman gran influencia en el desempeño de un elemento de concreto armado.
Otra de las propiedades en las que tiene influencia el acero de refuerzo, es sobre la ductilidad que le pueda conferir a la sección y al elemento estructural como tal. La ductilidad es la capacidad que tiene un material de deformarse sin llegar a la falla. En vigas de concreto armado con responsabilidad sísmica, es de vital importancia que las secciones cuenten con una ductilidad adecuada. Por este motivo, es importante medir la ductilidad de curvatura con la que cuentan las secciones donde se esperan deformaciones importantes.
Tanto en estudios experimentales como teóricos, se ha podido comprobar la influencia del acero en la ductilidad de secciones de concreto armado. Es así como Ottazzi & Muñoz [11] llevaron a cabo una investigación sobre la influencia de la plataforma de fluencia y el endurecimiento del acero. Pudieron comprobar que para cuantías moderadas de acero, los diagramas de momento – curvatura adoptaban la misma forma de los diagramas de esfuerzo deformación del acero. También concluyeron que los aceros con grandes plataformas de fluencia y sin endurecimiento, proporcionan gran ductilidad de curvatura.
En la figura 6, se ha intentado representar la influencia del modelo constitutivo del acero en el diagrama de momento curvatura.
Es cierto que para el diseño de estructuras de concreto armado es práctico utilizar diagramas de esfuerzo – deformación del acero con grandes plataformas de fluencia o, en otras palabras, elastoplástico perfecto debido a la simplicidad que le confiere a los cálculos. Sin embargo, para realizar un análisis minucioso de las propiedades y resistencia que ofrece una sección, es más apropiado utilizar un diagrama más real.
Por este motivo, para la presente tesis se utilizará el modelo constitutivo para el acero desarrollado por Chang & Mander [12], el cual fue calibrado utilizando los ensayos realizados por Kent & Park en 1973. En este modelo se representa la zona lineal elástica inicial, la plataforma de fluencia y la curva de endurecimiento calibrada bajo ciertos parámetros propios de cada acero. En la figura 7 se muestra la curva esfuerzo – deformación descrita, además de la ecuación que relaciona el esfuerzo y deformación en la zona de endurecimiento.
13.6 Diagramas de momento – Curvatura
Para complementar la definición de ductilidad de curvatura, es importante presentar el concepto de diagrama de momento – curvatura para una sección de concreto armado.
Este diagrama es una relación entre el momento flector aplicado y la curvatura que se presenta en la sección ante cada incremento de momento.
Existen distintas zonas y puntos importantes en este diagrama. Entre los puntos notables de este diagrama, se puede destacar los siguientes:
Mcr = Momento de agrietamiento de la sección. Este punto corresponde al instante en el que la fibra extrema de concreto en tracción se fisura.
My = Momento de fluencia o primera fluencia de la sección. En este punto, el acero en tracción más alejado del eje neutro, llega a la fluencia. Es decir que su esfuerzo, fs, llega al esfuerzo de fluencia, fy. Cabe resaltar que este punto es el inicio del comportamiento plástico de la sección.
Mult = Momento último o máximo de la sección. Se suele asociar la falla de la sección en flexión, normalmente, al instante en que la fibra más lejana de concreto en compresión llega a su máxima deformación, εcu.
El diagrama presentado en la figura 10 es una representación de 3 puntos importantes del
diagrama de momento – curvatura. Se puede elaborar un diagrama más completo si se toma en consideración la curva de esfuerzo – deformación real tanto para el acero como para el concreto.
Para tener una idea rápida del comportamiento de la sección, bastará con un diagrama como el mostrado en la figura 10. También se podría elaborar un diagrama de momento – curvatura elastoplástico perfecto como el que propone CALTRANS [14]. Este diagrama es una idealización de un diagrama bilineal que aprovecha el equilibrio de energía en la sección. En la figura 11 se puede observar un esquema general de lo necesario para generar un diagrama de momento - curvatura: Equilibrio, compatibilidad de deformaciones y relaciones constitutivas de los materiales.
En la figura 12, se presenta a manera de comparación, el diagrama de momento curvatura completo de la sección mostrada (Viga VA01), la aproximación propuesta por Caltrans y un diagrama bilineal simplificado. Este último solo considera el momento de fluencia y el momento último.
Se puede observar lo buena aproximación del diagrama bilineal respecto al real. Además,
se deduce que la propuesta hecha por Caltrans es conservadora en cuanto a resistencia
respecto al diagrama completo. Cabe indicar que el diagrama “completo” de una sección de concreto armado, corresponde al que ha sido desarrollado tomando en cuenta relaciones constitutivas de Hognestad y Chang & Mander, para el concreto y acero respectivamente.
13.7. Análisis y Diseño Límite
Actualmente el diseño para estructuras de concreto armado comprende un Vanálisis estructural en el que se asume que la distribución elástica de los momentos flectores permanece elástica hasta llegar a la carga máxima por resistencia.
Desde ya hace más de 50 años, el ACI propuso el método de diseño por resistencia, el cual se utiliza actualmente también en el Perú. Cohn [16] en el año 1963 hacía referencia a que el comportamiento real de las estructuras de concreto armado no es lineal elástico como se supone en el diseño actualmente. Considera inconsistente que se realice un análisis estructural elástico pero se diseñe para resistencia última de la sección, es decir, cuando esta ya ha incursionado en el rango inelástico.
Cohn [16], también resalta que hay muchos puntos a favor de utilizar un análisis límite o
inelástico para vigas de concreto armado entre los que se puede resaltar los siguientes:
Se podría ahorrar en acero debido a que se podría tomar en cuenta la capacidad de redistribución de momentos.
Más posibilidades de diseño y más adecuadas según el requerimiento.
Sin embargo, como el análisis limite supone que las estructuras tienen la capacidad de formar rotulas plásticas y, finalmente, un mecanismo plástico completo, es complicado generar un método sencillo para poder utilizarlo. Otra de las complicaciones con las que cuenta, es que al reducir el acero requerido, el estado de servicio se ve afectado en cuanto a agrietamiento y deflexiones excesivas.
Aún así, a lo largo de los años se han planteado propuestas para el análisis y diseño límite, dentro de las cuales se puede resaltar la propuesta de Cohn [17]. En esta, se asume un diagrama de momentos flectores para la carga máxima que puede resistir el elemento en análisis. Como el equilibrio se debe mantener incluso para el estado límite, es necesario revisar la compatibilidad de deformaciones inelásticas. Siendo más específico, se propone estimar la demanda de rotación inelástica y se compara con la disponible. En paralelo, se va revisando el estado de deflexiones y agrietamiento para ver si es adecuado en servicio.
Otro de los puntos importantes a tomar en cuenta cuando se analiza y se diseña para carga límite, es que para que las vigas puedan llegar a dicha carga, no debe ocurrir una falla frágil por cortante. Por este motivo, es indispensable que se realice el diseño por capacidad de los estribos. En otras palabras, se debe diseñar los estribos de la viga con diámetro y espaciamiento adecuado, de tal manera que cuando se llegue a la carga límite, la falla sea por flexión y no por corte.
13.8. Rótulas plásticas y longitud plastificada equivalente
Como se ha presentado anteriormente, para las secciones de vigas de concreto armado,
se puede elaborar un diagrama de momento – curvatura donde se puede estudiar su comportamiento en servicio, inelástico y último.
Cuando las cargas aplicadas alcanzan un nivel tal que se genera la fluencia de una sección, se habla del origen de una rótula plástica. Esta es un conjunto de secciones que han llegado a la fluencia y en la cual las vigas, si tienen suficiente ductilidad, pueden lograr rotaciones inelásticas ante el aumento de la carga, sin llegar a la falla.
Para fines de cálculo, se asume que las rótulas plásticas se generan en las secciones de máximo momento flector tanto negativo como positivo, si se trata de una viga hiperestática, pero la realidad muestra que se trata más bien de una zona de rotula plástica y no una sola sección [4]. En la figura 13 se muestra una viga en voladizo con una carga en su extremo. La parte (b) de dicha figura muestra el diagrama de momentos flectores y (c) muestra el diagrama de la distribución de curvaturas a lo largo de la viga, para el diagrama de momentos de (b).
Se puede observar que existe una zona comenzando por el extremo derecho de máximo momento (Mu), en donde las secciones de la viga han sobrepasado el momento de
fluencia y ha permitido la formación de una rótula plástica de longitud “lp”.
13.9. Redistribución de momentos
Como se comentó al inicio del acápite 2.6, el análisis estructural que usamos actualmente para el diseño, supone un comportamiento lineal elástico desde que no existen cargas hasta la falla del elemento. Se sabe que en realidad el comportamiento se podría asumir lineal elástico hasta cierta etapa del estado de servicio pero no más allá de esta.
Fig.14 – Diagrama de momento – rotación de la sección mostrada (Analítico) La figura 15 muestra el esquema estructural de ensayo, en donde se ha marcado de color azul el diagrama de momentos obtenidos mediante un análisis elástico y de color rojo, el diagrama de momentos flectores con redistribución de momentos negativos hacia el positivo. Esto último quiere decir que se ha disminuido el momento máximo negativo y se traslada esta disminución hacia la zona de momento positivo.
Como el máximo momento negativo disminuye, la cuantía de acero negativo también. Esto se puede aplicar siempre y cuando la zona de máximo momento positivo tenga holgura de capacidad en flexión para poder soportar el momento redistribuido.
La redistribución de momentos en un fenómeno que puede ocurrir de manera forzada pero también ocurre de manera natural. Scott & Whittle [6] y Elfgren et al [20] mencionan, como ejemplo, que al asumir una rigidez a la flexión constante para todo un elemento como una viga, se está ignorando el hecho de que esta va variando dependiendo de la cuantía de acero y del estado de fisuración.
De esta manera, una vez que la viga empiece a trabajar, las secciones no tomará
momentos como en la suposición elástica sino que lo harán de acuerdo a sus rigideces reales. En ese sentido, se generará una suerte de redistribución de momentos sin haberla incluido de antemano [6].
Para poder redistribuir momentos en una viga de concreto armado es necesario tomar en cuenta y verificar los siguientes requisitos:
13.10. Diseño del bloque de empotramiento
En el esquema estructural planteado para la presente tesis, se ha supuesto un bloque cuadrado de concreto armado de 1200 x 1200 mm y 200 mm de espesor (Ver figura 17).
Las dimensiones seleccionadas vienen dadas para lograr la longitud de anclaje recto de una barra de acero de 3/4’’ (diámetro máximo usado), el cual según la norma E.060 es de 760 mm para un concreto con f’c 28.5 MPa (280 kg/cm2) y, también, por las condiciones de laboratorio. Como se puede ver en la figura 18, las zonas de anclaje a utilizarse están distanciadas a 900 mm.
Otro aspecto importante para el diseño del bloque, es la suposición de que este generará un empotramiento para las vigas en estudio. Para lograr esto, se necesita que el bloque no tenga rotación en ningún momento del ensayo. En ese sentido, se anclará el bloque de concreto a la losa de reacción del laboratorio por medio de dos barras de alta resistencia distanciadas a 900 mm una de la otra.
La carga de anclaje dada para cada una de las barras, fue hallada utilizando el siguiente procedimiento y suposiciones:
1. Se halló la carga límite para la viga más crítica (VA-01) según la metodología
mostrada en el acápite 3.2.
2. Se ha supuesto que las vigas tienen un comportamiento elástico (lo cual no es cierto luego de la fluencia de la zona de empotramiento) para hallar la fuerza cortante, por equilibrio, en la sección de encuentro entre la viga y el bloque.
3. Se trasladó dicha carga al centro de la sección del bloque y se calculó el momento generado asociado.
4. Con la carga axial debido a la carga límite, resistida por el bloque y el momento asociado, se hallaron los esfuerzos normales generados en la base del bloque.
5. Se ha supuesto que el bloque de empotramiento no girará si no existen esfuerzos normales de tracción en la base. En ese sentido, las cargas de anclaje serán de la magnitud necesaria para contrarrestar los esfuerzos de tracción generados por las cargas provenientes de la viga. Todo el proceso se encuentra resumido en la figura 23.
La carga máxima por anclaje que se puede dar para no dañar la losa de reacción del laboratorio es de 294.3 kN (30 Ton). Se ha hecho el diseño de la carga de anclaje con dicha restricción y se ha obtenido un esfuerzo remanente en tracción de 0.25 MPa, la cual, por las suposiciones hechas para hallarla, se considera despreciable. Con las cargas y momentos hallados, se ha realizado el diseño del acero de refuerzo del bloque que se muestra en los planos adjuntos a la presente tesis.
13.11 FUENTE:
TESIS ESTUDIO EXPERIMENTAL DE REDISTRIBUCIÓN DE MOMENTOS EN VIGAS DE CONCRETO ARMADODEL INGENIERO NORIEGA BARRUETO 2018-102 pg.
ESTUDIO DEL CONTROL DE ROTULAS PLASTICAS EN PORTICOS DE CONCRETO ARMADO - TEODORICO MANUEL FLORES BARRETO 2003- 184 pg.
En las vigas de hormigón armado, en particular cuando forman parte de pórticos resistentes a cargas gravitatorias y de sismo, los esfuerzos de flexión son los que deberían controlar el diseño. Como se verá, en la filosofía de diseño por capacidad, por lo general los extremos de las vigas son los lugares seleccionados para comenzar a rotularse plásticamente a los efectos de disipar la energía del sismo. Es por ello que la falla primaria debería ser iniciada por la fluencia de sus armaduras en tracción. Se deben evitar fallas de corte, de adherencia, de anclaje y de inestabilidad por pandeo. Además, bajo cargas de servicio se deben satisfacer los requerimientos de rigidez, los cuales se verifican manteniendo las deformadas por debajo de los niveles admisibles.
12.2 - DEFINICIONES
Código ACI 318-99 - Capítulo 21
Algunas definiciones de especial importancia:
Elementos de borde (Boundary elements) – Partes de los muros estructurales y los diafragmas, localizadas en los bordes y alrededor de las aberturas, a las cuales se les da resistencia adicional por medio de armaduras longitudinales y transversales.
Elementos colectores (Collector elements) – Elementos, localizados dentro de los diafragmas, que transmiten las fuerzas inerciales al sistema de resistencia ante fuerzas horizontales.
Estribo suplementario (Crosstie) – Barra de refuerzo que tiene un gancho sísmico en un extremo y en el otro extremo un gancho de no menos de 90° con una extensión de 6db. Los ganchos deben abrazar el refuerzo longitudinal. Los ganchos de 90° se deben alternar en la altura.
Desplazamiento de diseño (Design displacement) – Desplazamiento horizontal total esperado para el sismo de diseño, tal como lo prescribe el Código general.
Estribo de confinamiento (Hoop) – Un estribo cerrado o enrollado continuo.
Puede estar compuesto por uno o varios elementos, cada uno de los cuales debe tener ganchos sísmicos en sus extremos.
Sistema de resistencia sísmica (Lateral-force resisting system) –
Aquella parte de la estructura compuesta por elementos diseñados para resistir las fuerzas provenientes de los efectos sísmicos.
Pórtico de Momento (Moment frame) – Pórtico espacial en el cual los elementos y nudos (o conexiones) resisten las solicitaciones por medio de flexión, fuerzas cortantes y fuerzas axiales. Existen las siguientes clases de pórticos:
Pórtico de momento intermedio (Intermediate moment frame) –Un pórtico que cumple con los requisitos de 21.2.2.3 y 21.10 adicionalmente a los de pórticos comunes.
Pórtico de momento ordinario (Ordinary moment frames) – Un pórtico que cumple con los requisitos de los Capítulos 1 a 18.
Pórtico de momento especial (Special moment frame) – Un pórtico que cumple con los requisitos de las Secciones 21.2 a 21.5 adicionalmente a los de pórticos comunes.
Muros estructurales (Structural walls) – Muros dispuestos para que resistan combinaciones de fuerzas cortantes, momentos y fuerzas axiales inducidas por los movimientos sísmicos. Un muro de corte (shear wall) es un muro estructural. Existen las siguientes clases de muros estructurales:
Muro estructural común de concreto armado (Ordinary reinforced concrete structural wall) – Un muro que cumple con los requisitos de los Capítulos 1 a 18.
Muro estructural común de concreto simple (Ordinary structural plain concrete wall) – Un muro que cumple con los requisitos de Capítulo 22.
Muro estructural especial de concreto armado (Special reinforced concrete structural wall) – Un muro que cumple con los requisitos de 21.2 y 21.6 adicionalmente a los requisitos de muros estructurales comunes.
Gancho sísmico (Seismic hook) – Gancho en un estribo, estribo de confinamiento o estribo suplementario que tiene un doblez de no menos de 135° y una extensión de 6d b, pero no menos de 75 mm, que abraza el refuerzo longitudinal y se proyecta hacia el interior de la sección.
Elementos de borde especiales (Special boundary elements) – Elementos de borde requeridos por 21.6.6.2 y 21.6.6.3.
12.3 - REQUISITOS GENERALES
Alcance
El Capítulo 21 contiene lo que se considera deben ser los requisitos mínimos que se deben emplear en las estructuras de concreto armado para que sean capaces de resistir una serie de oscilaciones en el rango inelástico de respuesta sin que se presente un deterioro crítico de su resistencia. Por lo tanto el objetivo es dar capacidad de disipación de energía en el rango inelástico de respuesta.
12.4 - ELEMENTOS A FLEXIÓN EN PÓRTICOS ESPECIALES
REFUERZO LONGITUDINAL Las resistencias a momento en cualquier sección deben cumplir:
REFUERZO TRANSVERSAL TODOS ESTOS REQUISITOS ASEGURAN U NA CAPACIDAD DE DUCTILIDAD ALTA PARA TODAS LAS SECCIONES CRÍTICAS DE VIGAS
FUERZAS CORTANTES DE DISEÑO Las fuerzas de diseño se calcularán en base a las cargas por gravedad factorizadas y los momentos resistentes de las secciones en el elemento.
Los Mnu se encuentran considerando que el esfuerzo en el acero es fs =α f ; (α =1.25) y el factor de reducción de capacidad φ =1
12.5 REDISTRIBUCIÓN DE MOMENTOS.
FUNDAMENTOS Y OBJETIVOS. En general, la combinación de los efectos de cargas gravitatorias y de sismo resulta en una distribución de momentos en los pórticos que no permiten un diseño muy efectivo de las vigas y las columnas.
Los objetivos de la redistribución de esfuerzos se pueden resumir en:
(i) Reducir el máximo momento absoluto, generalmente en la zona de momento negativo de la viga, y compensar dicha reducción incrementando los momentos (generalmente positivos) en las zonas no críticas. Donde sea conveniente y posible, se tratará de que los momentos requeridos negativo y positivos sean aproximadamente iguales. Esto resultará en un arreglo de armaduras para flexión simple y simétrica en esas secciones de vigas.
(ii) Igualar los requerimientos de momentos críticos para las secciones de vigas ubicadas en caras opuestas de columnas interiores, que resultan de la reversión de las fuerzas sísmicas aplicadas. La ventaja de igualar momentos a ambos lados de la columna es evitar tener que anclar armadura de flexión en las vigas en el interior de la unión viga-columna o nudo. En el caso en que se acepten momentos diferentes a ambos lados, y no se ancle en el nudo, el diseño estará controlado por el mayor momento y al anclar del otro lado las armaduras producirán una sobre resistencia a flexión que no es deseada.
(iii) Utilizar la máxima capacidad de momento positivo que requieren los códigos cuando éste excede las demandas derivadas de un análisis elástico. En general, los códigos, por ejemplo el IC-103-II, sección 2.2.6, establecen que en zonas potenciales de rótulas plásticas, la armadura de compresión A´s debe al menos ser igual al 50 % de la armadura As en tracción. La intención de esta exigencia es: (i) asegurar que la presencia de armadura de compresión en flexión contribuya a una adecuada ductilidad de la sección bajo la acción de grandes momentos negativos, y (ii) suministrar un mínimo de resistencia a momento positivo que contemple su presencia ante las incertidumbres de la modelación de cargas y estructura.
12.6 REQUERIMIENTOS DE EQUILIBRIO PARA REDISTRIBUCIÓN DE MOMENTOS
El requerimiento esencial en el proceso de redistribución de momentos es que se debe mantener el equilibrio ante las acciones sísmicas y gravitatorias. La Fig. 1 representa una porción de un pórtico de un edificio de varios pisos, la cual se toma como cuerpo libre cortando las columnas en sus puntos de inflexión de momentos por encima y por debajo de la viga de un piso cualquiera. La configuración de diagramas de momentos que se muestra resulta de un análisis elástico ante las acciones simultáneas de cargas gravitatorias y fuerzas sísmicas. Se designa con V´j y Vj respectivamente a las fuerzas de corte transmitidas por las columnas por encima y por debajo del piso, cuando la dirección del sismo es de izquierda a derecha, como lo indica la fuerza Fj. Note que esas fuerzas de corte incluyen los efectos de las cargas gravitatorias. Sin embargo, dado que no hay fuerzas horizontales aplicadas al pórtico debido a cargas gravitatorias, no puede existir un corte asociado a dichas cargas. Por lo tanto, la suma de las fuerzas de corte en cada piso que corresponden a cargas verticales debe ser nula. En consecuencia, las fuerzas de corte de piso resultantes en cada nivel, V´j y Vj, son exclusivamente debidas a las fuerzas horizontales sísmicas Fj. En la figura, con i se designa a cada columna (de i=1 a i=4 en este caso), mientras que j corresponde a un nivel determinado del pórtico.
Al considerar las condiciones de equilibrio, se hace la simplificación de que la distancia entre los puntos de contraflecha de las columnas por encima y por debajo de la viga es la misma para todas las columnas del pórtico, y que esta distancia no cambia durante la redistribución de momentos en las vigas. Se puede comprobar que esto es una suposición bastante válida para pórticos relativamente regulares. En función de lo indicado en la Fig. 1, la condición supuesta es que (l´i+li)=lc, es una constante. La condición de equilibrio a satisfacer se puede plantear con las fuerzas de corte por un lado y con los momentos por otro. El equilibrio de fuerzas horizontales requiere:
12.7 DISEÑO DE SECCIONES DE HORMIGÓN ARMADO A FLEXIÓN.
En el Cap. 10 del C-201-05 están las consideraciones generales que hacen al diseño de secciones de hormigón armado sometidas a flexión y a esfuerzo axial, y combinación de ambas. Se hace una síntesis a continuación:
Se debe cumplir con las condiciones de equilibrio (estática) y compatibilidad deformaciones).
Las deformaciones se consideran proporcionales a la distancia al eje neutro.
Para la resistencia nominal adoptar en el hormigón ´cmáx= 0.003.
Para el acero adoptar fs = Es . s, cuando fs < fy, y si s y, adoptar fs = fy.
Se ignora la resistencia a tracción del hormigón.
La relación f- del hormigón en compresión se puede adoptar como rectangular, trapezoidal, parabólica o de otra forma que de resultados satisfactorios.
Se puede usar para el punto anterior el diagrama simplificado de distribución de tensiones equivalentes.
Note que la ductilidad de curvaturas para la falla balanceada es 1.0 (no cero), y el diseñador debe alejarse de esta situación pues en ese caso el comportamiento de la
sección sería frágil. En vigas, la máxima deformación del acero y por ende la ductilidad
está controlada por la cantidad de armadura en tracción. En columnas, quien controla
el tipo de falla fundamentalmente es el nivel de carga axial.
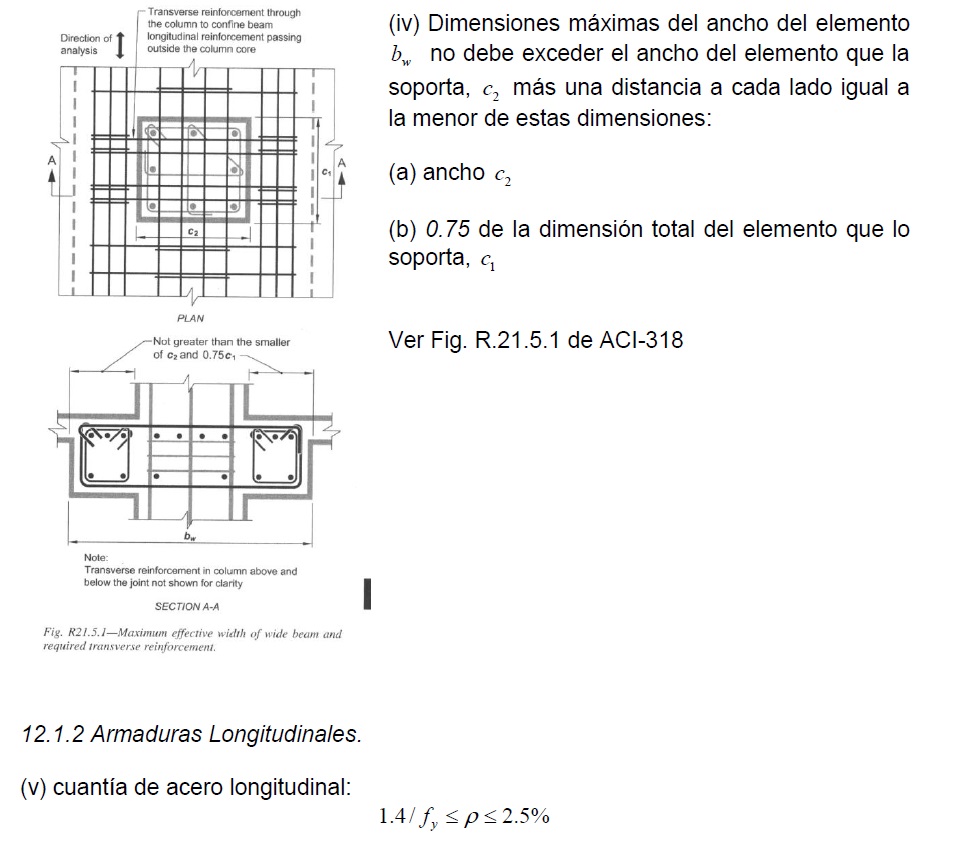
12.8 DISTANCIA ENTRE LOS APOYOS LATERALES DE ELEMENTOS SOMETIDOS A FLEXIÓN Y DE DIMENSIONES DE LOS ELEMENTOS.
En la parte sísmica, el ACI-103, sección 2.2.1 y el NTP:3101 en sección 8.5.2 establecen las siguientes limitaciones:
Además, el ACI-103, sección 2.2.1.5 impone que si la viga es más ancha que la columna, el ancho de la viga que resiste las acciones de la columna se debe tomar según indica la Fig.6.
12.9 DEFINICIÓN DE LONGITUD DE RÓTULA PLÁSTICA.
Es importante identificar con claridad las ubicaciones y extensiones de las potenciales rótulas plásticas dado que ellas son objeto de detalles especiales en el caso de pórticos dúctiles sometidos a acciones sísmicas. En el caso de que las acciones que controlan el diseño son las sísmicas, las rótulas plásticas se localizan comúnmente en la zona adyacente de las caras de las columnas, como se muestra en el caso de las vigas más cortas de la Fig. 7(a). En la Fig. 8 se muestra la extensión de la zona de rótula para el caso de sección crítica ubicada en la cara de la columna y en el tramo de la viga. En este último caso se ve que en la cara de la zona de momento positivo se debe tomar lRP=2(2h)=2h. Hay casos en que por diversos motivos, como problemas para anclar las barras de las vigas, el diseñador decide mover la plastificación hacia el centro de la viga. En esos casos, la Fig. 9 muestra la longitud a considerar como plástica.
12.10. GANCHOS NORMALES.
Por aplicación de las normas en estudio, ya no es necesario utilizar ganchos en todos los extremos de las barras como lo exige el CCSR-Mza-87. Esto es algo muy racional pues no es necesario utilizar ganchos cuando no se los necesita, y en muchos casos va en detrimento de la respuesta, ver. Ref.[12]. Los ganchos normales según C-201-05 se muestran en la Fig. 10(a).
12.11 ACI-318-2001. CAPÍTULO 21.
Se extractan puntos principales. 12.1 Miembros a flexión de Pórticos Especiales. 12.1.1 Relaciones de dimensiones.